pyControl¶
Open source, Python based, behavioural experiment control.
Overview¶
pyControl is a system of open source hardware and software for controlling behavioural experiments in neuroscience and psychology, built around the MicroPython microcontroller.
pyControl makes it easy to program complex behavioural tasks using a clean, intuitive, and flexible syntax for specifying tasks as state machines. User created task definition files, written in Python, run directly on the microcontroller, supported by pyControl framework code. This gives users the power and simplicity of Python for specifying task behaviour, while allowing low-level access to the microcontroller hardware directly from task code. For more information see programming tasks.
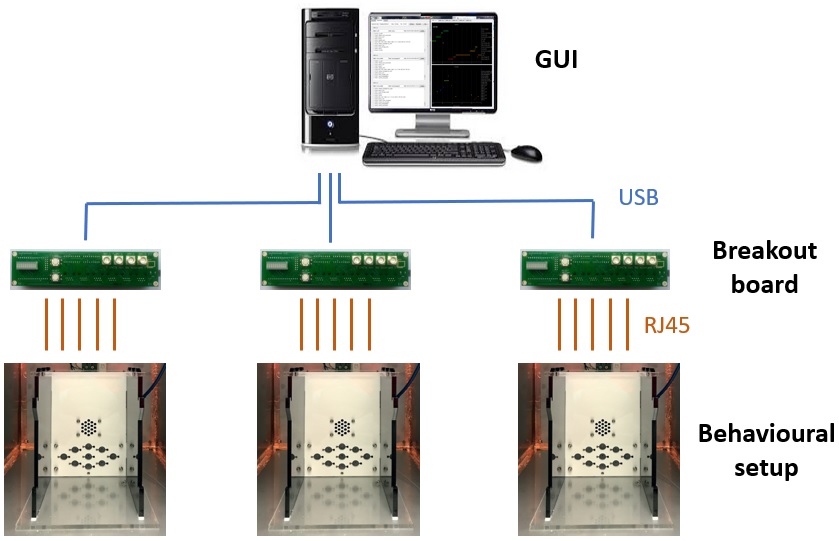
pyControl hardware consists of a breakout board and a set of devices such as nose-pokes, audio boards, LED drivers, rotary encoders and stepper motor controllers that are connected to the breakout board to create behavioural setups. Assembled pyControl hardware is available from the Open Ephys store and LabMaker.
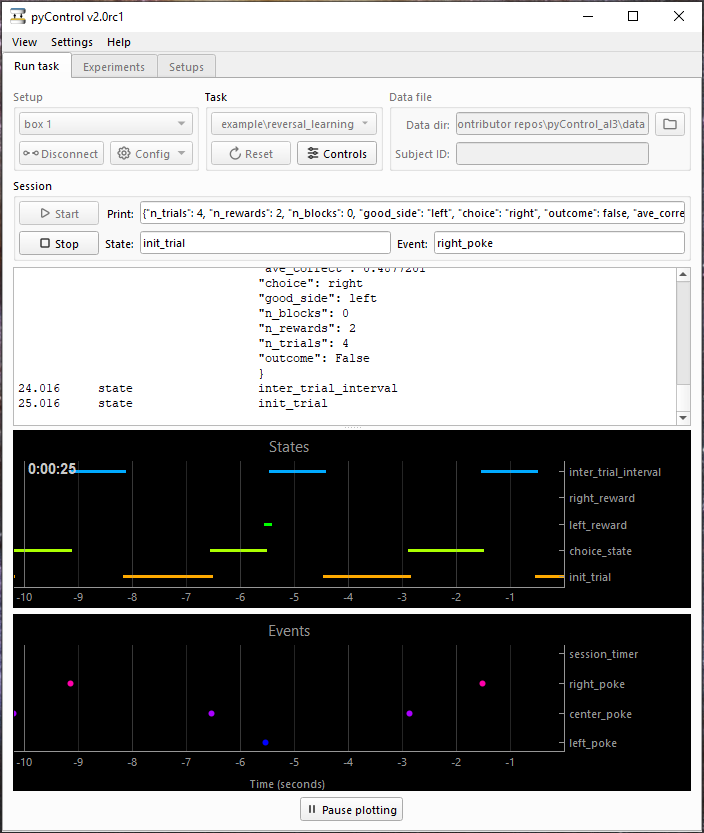
pyControl has a Graphical User Interface for controlling experiments and visualising behaviour.
Data generated by pyControl experiments is stored in generic file formats (.tsv and .npy) that can be straightforwardly imported by most programming languages used for data analysis.
pyControl hardware, software and documentation repositories are hosted on GitHub, with a discussion board for user discussions and support.
The pyControl manuscript gives a high level overview of the system design and its rationale and has validation experiments and example use cases. If you use pyControl in a publication, please cite it.
If you do fiber photometry experiments, you may be interested in pyControl's sister project pyPhotometry.
Getting started¶
Installation¶
Get the latest version of the pyControl GUI, either by downloading it at a zip file from the releases page or by cloning the code repository to your computer with Git. pyControl is in active development with new versions released from time to time. The default documentation is for the latest release, but the dropdown menu in the bottom right corner of the docs lets you access documentation for earlier versions, and for the dev branch of the code repository where new features are developed. Cloning the repository is recommended as it makes it easier to update pyControl in the future.
Either way you obtain the code, you will have the following folder structure:
pyControl
├── pyControl_GUI.py # Script to launch the GUI
├── api_classes # API classes
├── config # Configuration files
├── controls_dialog # Custom controls dialog files
├── data # Data generated by pyControl
├── devices # Hardware device classes
├── experiments # Experiment definition files
├── hardware_defintions # Hardware definition files
├── source
│ ├── communication # Serial communication and data logging
│ ├── pyControl # pyControl framework
│ └── tests # Test code
├── tasks # Task definition files
└── tools # Tools for working with pycontrol data
Dependencies¶
pyControl has the following dependencies:
On a Windows machine that does not already have Python installed, the simplest way to install Python is to download an installer from python.org. To ensure you can run Python files (including the pyControl GUI) by double-clicking on them, select the options 'Add Python to PATH', 'Add Python to environment variables', and 'Associate files with Python' during installation. Note; selecting these options when installing Python will cause the Python version you are installing to take precedence over any other version of Python installed on the computer, so may break previous Python based workflows on the computer.
Once you have a working Python 3 installation on the computer, run the windows command prompt (cmd.exe) as an administrator and enter the following commands to install the required packages:
python -m pip install numpy
python -m pip install pyserial
python -m pip install PyQt6
python -m pip install pyqtgraph
You should then be able to launch the GUI by double-clicking the file pyControl_GUI.pyw in the pyControl root directory.
pyControl has been tested primarily on Windows 10 but in principle should be cross-platform and has been used on Mac and Linux.
Running a task¶
Run the file pyControl_GUI.py in the pyControl root directory, you will see a GUI window like that shown above, with the Run Task tab selected.
Plug in a pyboard and it will appear in the dropdown menu in the Setup box. Select the board and press the Connect button. The GUI will connect to the board. (Linux users please see this note if having difficulty connecting.)
If the pyControl framework is not already installed on the board, you will see a message saying Load pyControl framework using 'Config' button. Press the Config button to bring up the config menu and select Load framework. If you see a message prompting you to disable the pyboard filesystem from acting as a USB flash drive, click Yes, then reconnect to the board (the serial port may have changed when you disable the flash drive) and load the framework.
Once the pyControl framework is installed on the board, from the Tasks drop down menu, select the task blinker in the example folder. Press the Upload button to upload the task to the pyboard.
Press the Start button. The task will run causing the blue LED on the pyboard to start blinking.
Stop the task with the Stop button.
To save data generated by the task to disk, enter a subject ID in the Subject ID text box. The Start button will change to Record indicating that data from the run will be saved. Run the task with the Record button, a data file will be created in the pyControl/data folder.
See the GUI user guide for information on configuring and running experiments on multiple boxes in parallel.
Updating pyControl¶
If you installed pyControl by cloning it with git, you can update it by simply pulling the latest version from the code repository.
Alternatively, you can download the latest version from the download page, unzip it, and copy across the tasks directory, experiments directory, and config directory from your old installation to keep your tasks, experiments and configuration settings.
Either way, after updating pyControl reload the framework onto your pyboards using the GUI's board config menu.
Get notified of new releases by going to the pyControl code repository and in the upper right corner choosing Watch→Custom→Releases→Apply.
Troubleshooting¶
If you encounter problems take a look at the troubleshooting page or post a message on the discussion board.
Developer's guide¶
Do you want to contribute to the pyControl project? You can find more information here.